

The Palmer Glacier on Oregon’s Mount Hood isn’t the moon, but it’s a good place to practice.
Some 6,000 feet up the snow-capped mountain, located about 70 miles east of Portland, a multi-disciplinary team from the University of Southern California, Texas A&M University, Georgia Institute of Technology, Oregon State University, Temple University, the University of Pennsylvania and NASA recently gathered to turn loose a four-legged robot named Spirit into the wild.
The team that included engineers, cognitive scientists, geoscientists and planetary scientists field-tested Spirit as part of the LASSIE Project: Legged Autonomous Surface Science in Analog Environments. Spirit covered a variety of challenging terrains, using his spindly metal legs to amble over, across and around shifting dirt, slushy snow and boulders during five days of testing in summer 2023. Sometimes he expertly traversed the hillside, while at other moments, he teetered and fell over — all part of the trial-and-error process to better understand the substrate properties and learn to better walk on these extreme terrains. The practice time Spirit logged produced data that will be used to train future robots for use on intergalactic surfaces, like Earth’s moon and perhaps other planetary bodies in our solar system.
“A legged robot needs to be able to detect what is happening when it interacts with the ground underneath, and rapidly adjust its locomotion strategies accordingly,” said Dr. Feifei Qian, an assistant professor of electrical and computer engineering at the USC Viterbi School of Engineering and School of Advanced Computing, which is leading the project funded by NASA. “When the robot leg slips on ice or sinks into soft snow, it inspires us to look for new principles and strategies that can push the boundary of human knowledge and enable new technology. We learn and improve from the observed failures.”
Dr. Marion Nachon, an associate research scientist and lecturer in the Department of Geology and Geophysics at Texas A&M, is a co-investigator for the three-year project along with NASA Johnson Space Center geologist and former Texas A&M Geology and Geophysics professor Dr. Ryan Ewing. The aim of the research is to create and test next-generation, high-mobility walking, or "legged," robots capable of agilely moving through a variety of challenging planetary environments including icy surfaces, crusted sand and rocky terrain to flexibly support scientific exploration goals and enhance scientists' abilities to gather information in space as well as other difficult-to-navigate environments.
Nachon, who originally came to Texas A&M in 2018 as a postdoctoral researcher, has more than a decade of expertise working with NASA Mars Exploration Rover missions — first, Curiosity, and currently, Perseverance. Her work focuses on data analysis in an ongoing effort to learn more about the composition of Mars' surface and better understand the geologic history of the planet. In addition, she has been involved with rover "operations," or the daily decision-making aspect of what terrains and rocks to explore and analyze.

"Rover operations is a daily and intensive teamwork-based effort that requires discussions between teams of engineers and of scientists involved with all the rover instruments," Nachon said. "We work together in order to send everyday instructions to the rover so that its instruments work on what we want them to do as soon as the day starts on Mars."
In a similar fashion for the LASSIE Project, Nachon helps to organize the collaboration's fieldwork campaigns at White Sands and Mount Hood, assisting in the planning and coordination of the scientific, operations and robotics teams while also participating in data and sample collection and analysis.
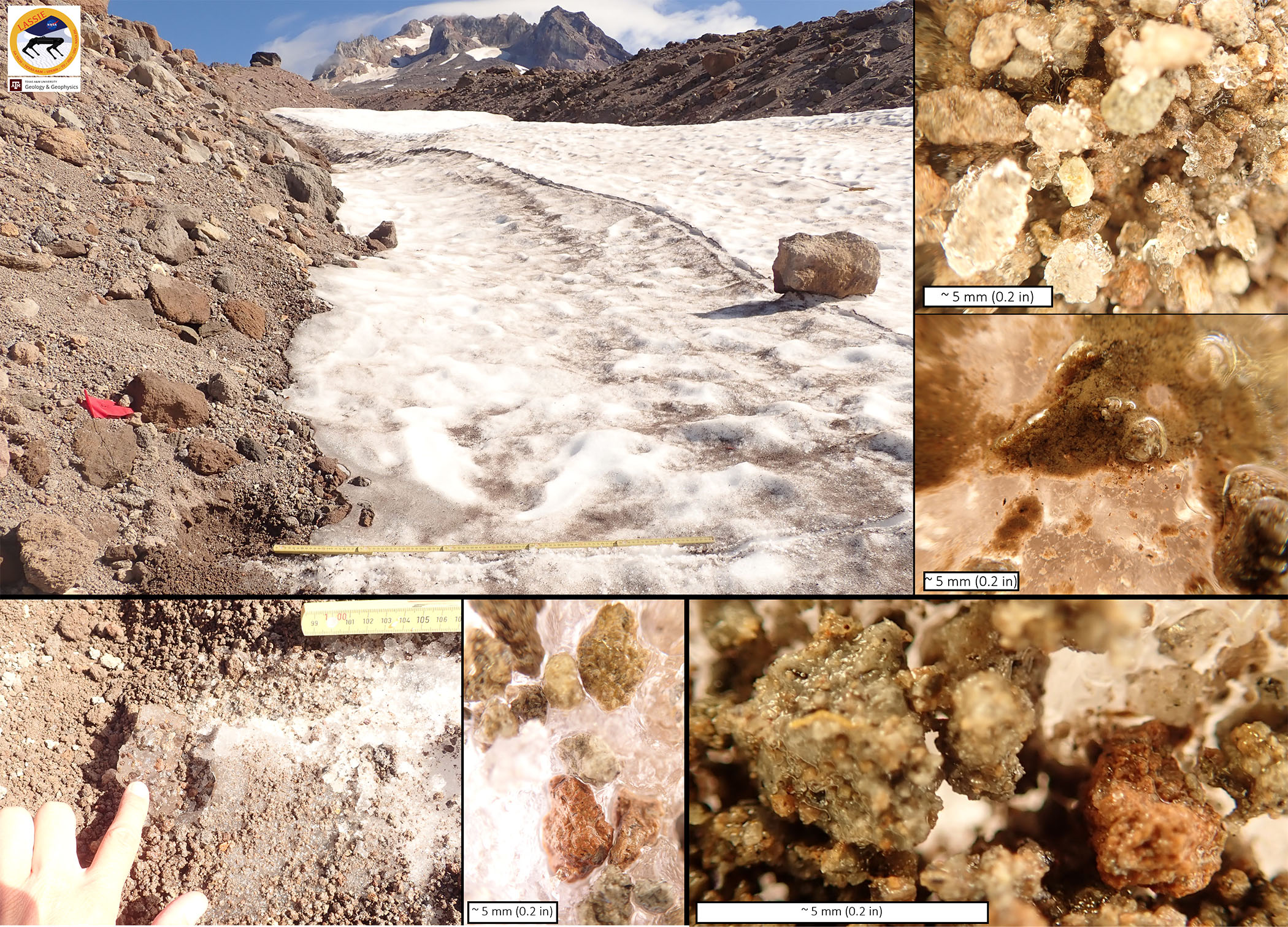
"One of my key contributions is investigating the high-resolution textures of the granular material and collecting samples that we can analyze using micro-X-ray fluorescence, which is a technique that also for the first time is being used onboard a Mars rover — Perseverance's PIXL instrument."
PIXL's name is a direct reference to "pixel," the smallest digital point in an image representing the heart of image processing and digital images, from space telescope pictures to rover "selfies."
Nachon notes that two additional Texas A&M Geology and Geophysics scientists are participating in the NASA Perseverance rover mission as experts in micro-X-ray fluorescence: Dr. Michael Tice and Dr. Lauren O’Neil.
As for Spirit, he continues to gain experience getting around in a variety of natural environments, with the goal of learning how to better move on challenging terrains. In addition to Qian letting him off his leash on Southern California beaches, the multi-university team has field-tested him in the soft granules of White Sands National Park in New Mexico as well as the otherworldly landscape of Mount Hood characteristic of planetary-analogue environments. The LASSIE Project calls for two more trips for Spirit — to White Sands and back to Mount Hood — ensuring plenty of opportunities for him to learn on Earth prior to potentially exploring other planets.
“You look around us, it would be very hard to drive up this,” says Ewing in a video produced for the team by documentary filmmaker Sean Grasso. “But as a legged being, as humans, we can step around it easily. A dog could walk around it easily. So this project is the proving ground that we can enable new science and new mobility on environments that are like other planets.”
The LASSIE research is funded by NASA through the PSTAR (Planetary Science and Technology Through Analog Research) project (Grant No. 80NSSC22K1313).
Learn more about the LASSIE Project, from its three main objectives to next steps.
This story is adapted from the original published by the University of Southern California. See a Spanish translation, courtesy of Dr. Marion Nachon and fellow LASSIE Project team member Dr. Frances Rivera-Hernández.
